モータードライバ TB6612FNGの使い方
データシートはこちら(引用:秋月電子様)
今回は、モータードライバーIC「TB6612FNG」について解説します。
ブレッドボードで扱いやすいようにDIP化されたモジュールとして販売されていることも多く、電子工作やロボット制御にぴったりのパーツです。
TB6612FNGの基本構成
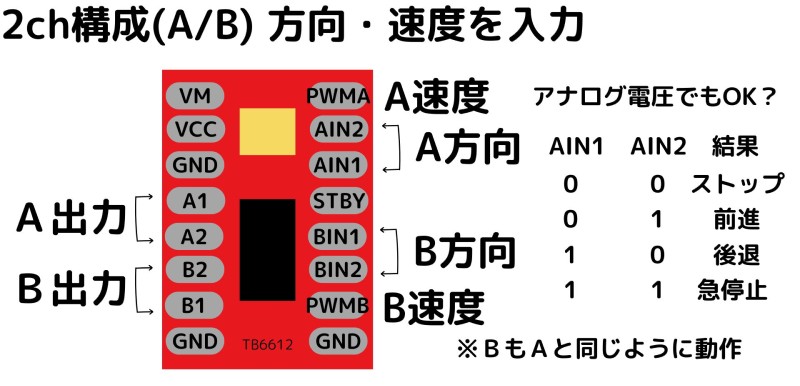
このモータードライバーは、2チャンネル(A・B)のモーター制御が可能です。
それぞれのチャンネルには以下のようなピンが用意されています。
- IN1 / IN2:モーターの回転方向を制御するデジタル入力ピン
- PWM:モーターの回転速度を制御するためのパルス幅変調(PWM)入力ピン
- OUT1 / OUT2:モーターに接続する出力ピン
IN1とIN2の組み合わせによって、モーターの正転・逆転・停止を制御します。
なお、「急停止」の設定はノイズを誘発する可能性があるため、使用には注意が必要です。
PWM入力について
PWMピンには、通常はデジタル信号(0と1の比率)を入力します。
PWM信号を使うのがベストです。
電源ピンの役割
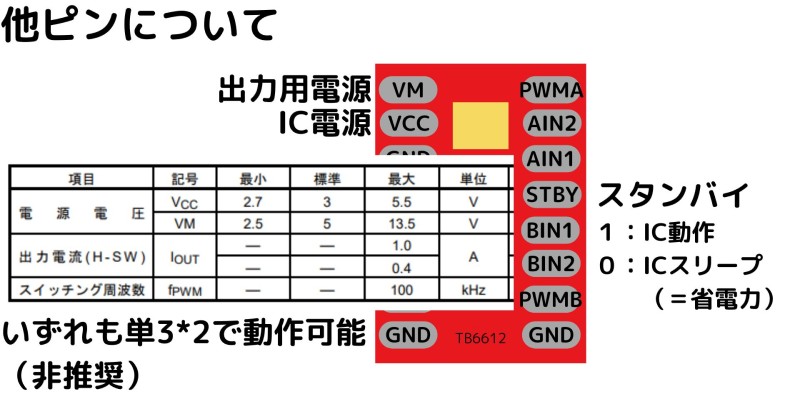
- VCC:モータードライバーIC自体の電源
- VM:モーター駆動用の電源
VCCとVMは異なる電圧が必要ですが、VMは最小2.5Vまで対応しているため、単三乾電池2本(3V)で両方をまかなうことも可能です。
ただし、モーター駆動時に電圧降下が起こる可能性があるため、安定性を考えると推奨される構成ではありません。
スタンバイピンの使い方
STBY(スタンバイ)ピンを制御することで、ICを動作状態にするか、スリープ状態にして省電力化するかを切り替えることができます。
入力側の回路構成
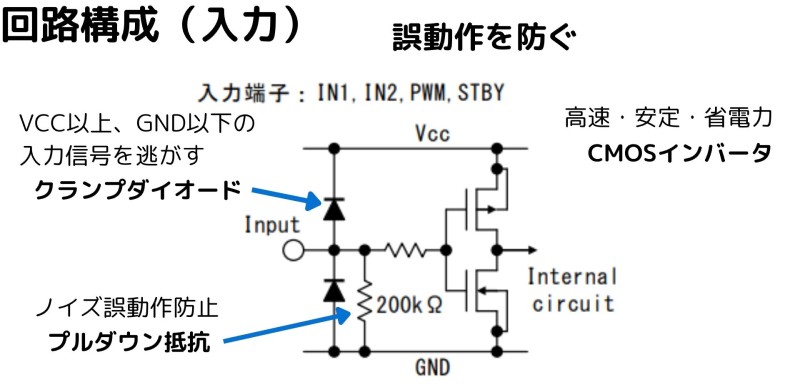
入力ピン(IN1、IN2、PWM、STBY)は以下のような構成になっています:
- クランプダイオード:過電圧からICを保護
- 200kΩのプルダウン抵抗:外来ノイズによる誤動作を防止
- CMOSインバータ:信号の整形と安定化
プルダウン抵抗がないと、ノイズでFETが誤ってオン・オフしてしまう可能性があるため、非常に重要な役割を果たしています。
出力側の回路構成
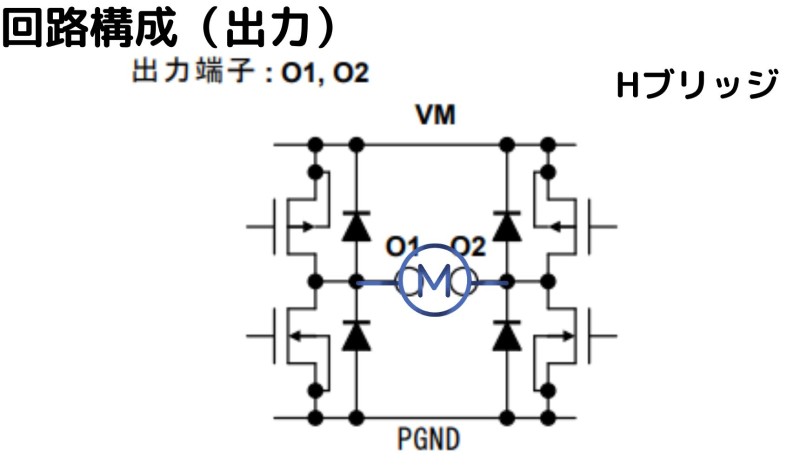
出力はHブリッジ構成になっており、4つのFETのオン・オフを制御することで、モーターの正転・逆転を実現します。
どちら側から電流を流すかによって、モーターの回転方向が決まります。
まとめ
TB6612FNGは、2チャンネル制御が可能で、PWMによる速度制御や方向制御が簡単に行える便利なモータードライバーです。
内部回路も工夫されており、ノイズ対策や省電力機能も備えています。
電子工作やロボット製作の入門にもぴったりなICですね!
