サーボモーターの使い方を紹介します
サーボモーターとは?
サーボモーターは、指定した角度に正確に動かすことができるモーターです。軸には「サーボホーン」と呼ばれる部品を取り付けて、他のパーツに動きを伝えることができます。
たとえば、以下のような用途で使われています:
- ロボットの腕や足の関節
- ラジコン飛行機の翼の動きの制御
動作範囲と制御方法
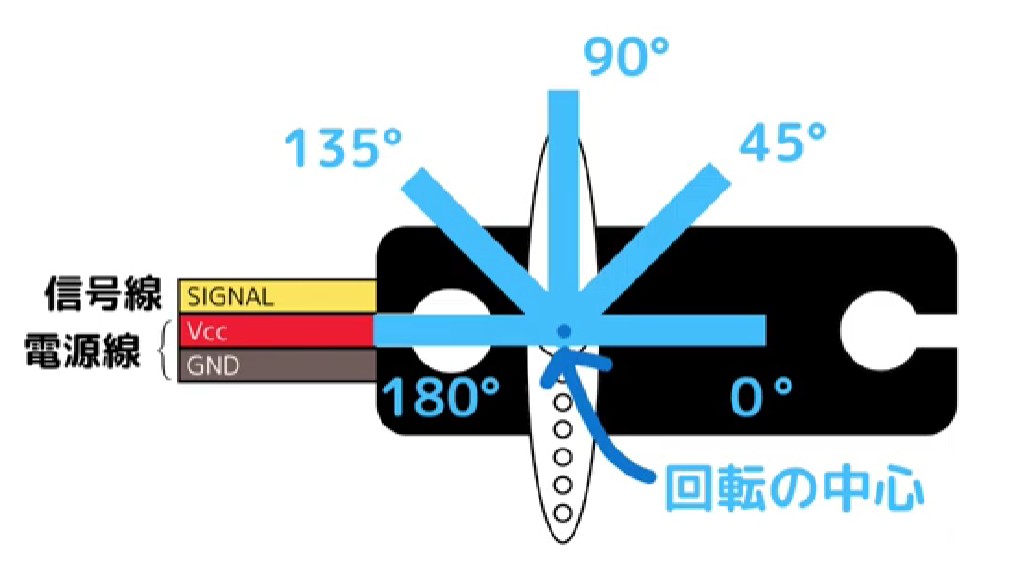
サーボモーターは、0度から180度の範囲で自由に位置を決めて停止することができます。
制御には3本の配線だけが必要です:
- 電源線(+)
- 電源線(−)
- 信号線(制御用)
サーボモーターの動作の仕組み
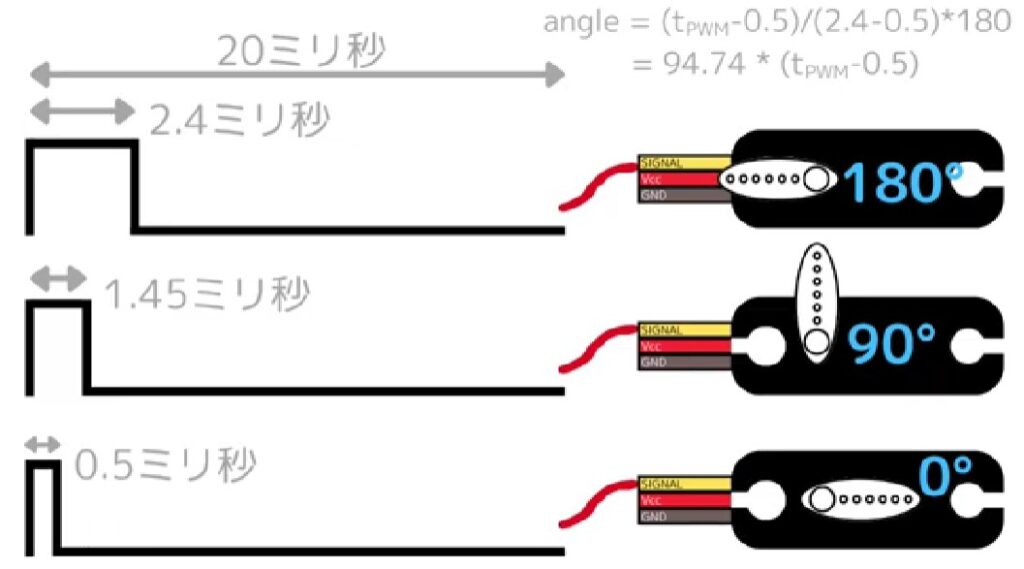
サーボモーターは、20ミリ秒ごとに信号線にかかる電圧の長さ(パルス幅)を読み取って、その長さに応じた角度に軸を動かします。
以下は、パルス幅と角度の関係の例です:
| パルス幅(ミリ秒) | 動作角度 |
|---|---|
| 0.5 ms | 0度 |
| 1.5 ms | 90度 |
| 2.4 ms | 180度 |
※実際の値はサーボモーターの種類によって多少異なる場合があります。
注意点
- 信号線に電圧をかけない場合、モーターは動作しません。
- 2.4ミリ秒以上の信号を送っても、モーターはそれ以上の角度には動きません(180度が最大)。
まとめ
サーボモーターは、決められた角度に正確に動かせる便利なモーターで、ロボットやラジコンなど、さまざまな場面で活躍しています。 3本の配線(電源2本+信号線1本)だけで制御できる手軽さも魅力のひとつ!
信号線に送るパルスの長さ(0.5ms〜2.4ms)によって、モーターの角度を自由にコントロールできる仕組みになっており、 このシンプルな制御方法で、0度〜180度の範囲をスムーズに動かせます。
電子工作やロボット制御の第一歩としてもぴったりなパーツなので、ぜひ実際に触ってみて、動きの面白さを体感してみてくださいね!
